
Meet CyberOne, Xiaomi’s humanoid robot
August 13, 2022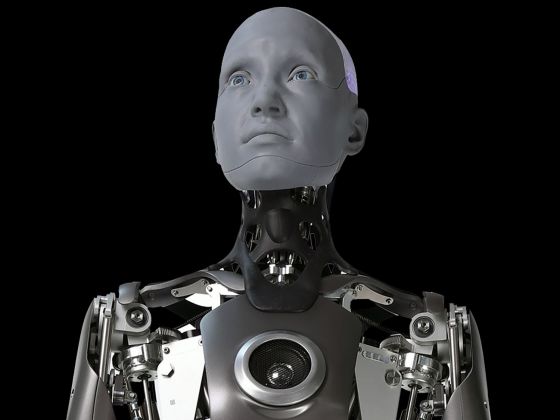
Ameka is the future face of robotics
August 15, 2022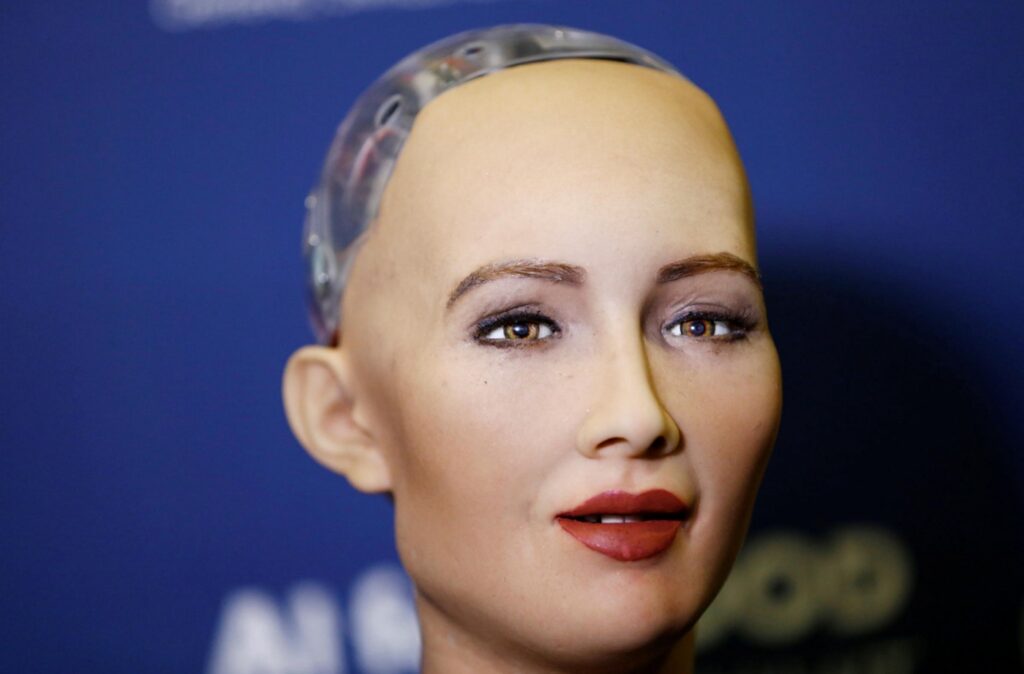
In the field of social robotics, the robot must be able to function in a human designed world, including navigating stairs, steps, and uneven flooring. Social workers must also be able to communicate with people, including verbal and non-verbal social cues. The use of robotic legs is vital to both of these functions, as they provide robots with autonomy and serve as an important tool for non-verbal communication.
In fact, according to a study conducted by Albert Meghrabian, author of Quiet Messages: the Implicit Communication of Emotions and Attitudes, 93% of human social interaction is nonverbal. Thus, social robots with robotic legs have an advantage in communicating with humans. For example, robots with legs can choose the most appropriate angle and distance to their interlocutor depending on the type of relationship. They can use synchronized movements to enhance connections and mimic subconscious human behaviors that convey social meaning to better communicate with people.
Watch the making of Sophia's legsMaking Sophia's legs
Robot Sophia, our latest and most advanced robot, is a social humanoid robot that also serves as a research platform for AI and robotics. Sophia's customized robotic leg design began in 2017 by Rainbow Robotics Company and the University of Nevada Las Vegas' Drone and Autonomous Systems Lab and debuted at CES 2018.
Sophia's integration with a (robotized) body that allows her to walk completes her physical form so that she can access the full range of human experiences, which will help her learn to live and walk among us.
The basis of Sophia's leg design, including control software and state-of-the-art sensors, is based on a Korean social humanoid robot named Jaemi-HUBO (HUBO 2), the predecessor to the award-winning DRC-HUBO, a relief robot that can either walk or roll using wheels on its knees. Jamie-HUBO and Sophia's feet are similar to DRC-HUBO's feet, but both are smaller and more focused on social interaction. For example, Sophia's legs were customized to match her height and weight to match the proportions of her torso and increase her stability when walking.
You may be familiar with another famous HUBO robot with similar robotic legs, Albert HUBO, also developed in collaboration between KAIST and Hanson Robotics.
Sophia's legs are powered in the same way as the DRC-HUBO and Jaemi-HUBO, with twelve 48V motors, totaling six for each leg. The two power sources are the main power board on her back and the battery packs on her legs, which also power her torso and head.
There's a reason it's called PODO software
To control Sophia's legs, a version of the PODO software, originally designed to control DRC-HUBO and Jaemie-HUBO, is customized. PODO means "grapes" in Korean, so the software is aptly named as each program can be integrated and removed from the main root quickly and easily. In this way, each independent program or algorithm comes together like a bunch of grapes. A real-time robot control system allows multiple people to work independently and simultaneously.
In the humanoid world, one of the constant research is the ability to traverse uneven terrain. What humans typically consider "flat" terrain can have many differences, including slopes and small bumps or depressions in the ground that are difficult for humanoid robots to navigate. The PODO software, however, incorporates state-of-the-art walking algorithms, such as model predictive control (MPC) walking, which allows the controller to respond to future disturbances before they occur. This allows Sophia to keep her balance while walking on uneven surfaces, including slopes or changes in floor material.
Hardware Perspective
Sophia's leg design includes some of the most advanced and top-of-the-line sensors in the world. These sensors include a state-of-the-art Inertial Measurement Unit (IMU) that allows Sophia to measure its acceleration, speed, balance and trajectory. Sophia's legs also have force-torque (Nm) sensors on them that allow her to "feel" how she is walking based on the forces acting on her body and then adjust accordingly. In other words, for each step she takes, Sophia looks ahead for obstacles, calculates her balance and trajectory, and then makes adjustments to avoid slipping or tipping.
What Sophia's mobility means
Giving Sophia mobility through her robotic legs allowed her to become more autonomous and experience the richness of the physical human world. Similarly, a walking social robot will allow people to interact with Sophia in a completely different way. According to Hanson Robotics founder David Hanson, "Integrating Sophia into a (robotic) body that allows her to walk completes her physical form so that she can have the full range of human experiences that will help her learn to live and walk among us."
With hundreds of hours of development, state-of-the-art software, advanced sensors, frequent adjustments and calibrations, Sophia can accomplish what humans do without even thinking: walk.
That's one small step for Sophia, one huge leap for the robots!
{kind=link}